

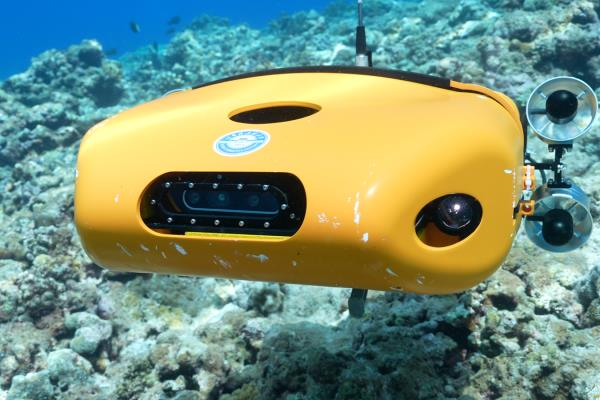
在南海的晨光中,一台直径约70厘米的水下机器人以优雅的弧线潜入碧波,它紧贴海底,距珊瑚礁盘仅几厘米,轻巧游动,四周沉积物只泛起细微涟漪。即便鱼群突然掠过,它也能灵巧扭动,从缝隙中穿梭而过,宛如海底飞盘般敏捷。
科技日报报导,这是哈尔滨工程大学船舶与工程学院王刚教授团队研发的敏捷型水下机器人「海龟」的真实工作场景。它不仅实现了近海底环境观测的厘米级突破、360度自由调整姿态,还打开一个更加精准、高效、环保的水下探测新时代。
在水下机器人领域深耕十余载,王刚深知传统底栖机器人地形适应能力弱,螺旋桨搅起的泥沙会破坏海底生态,更让观测数据蒙上「迷雾」。而全球珊瑚礁正以惊人速度退化,受限于暗流与深度,潜水员每年仅有两次观测时间窗口,且无法触及深水区,然而传统水下机器人观测效果又不尽如人意。
据报导,王刚团队从海龟的推进方式中找到了灵感,「我们发现海龟倾斜拍动前肢的推进方式,既能减少水体扰动,又能保持高效推进。」
对比试验中,传统水下机器人靠近海底时激起半米高的泥沙云,而「海龟」机器人凭借其精准布局的推进器,几乎在航行时不泛起涟漪,沉积物干扰降低了90%。
传统水下机器人在航行过程中需保持一定高度,以应对突发事件。然而,「海龟」机器人需为珊瑚观测服务,必须贴近海底工作,距离珊瑚不超过1米,以便准确捕捉颜色细节。这要求机器人必须具备超高灵敏度,能够瞬时调整姿态。
报导说,团队后来想出「三点惯性测量感知方法」。王刚说,搭载了三点惯性测量感知方法的机器人相比传统控制方式,数据噪声降低了约76.2%,响应时间缩短了1.1倍,倾角控制的稳定性提升了7.16倍。此外,机器人还采用了角加速度反馈控制,能够尽可能靠近海底而不触底。